In the previous class, we introduced the hardware structure and functions of the SC20 motion controller. In this class, we will learn about the SC30 together. The SC30 series controller currently has two versions, namely the SC30-B6H high-end version and the SC30-B6L standard version.
Two versions of SC30 series motion controller

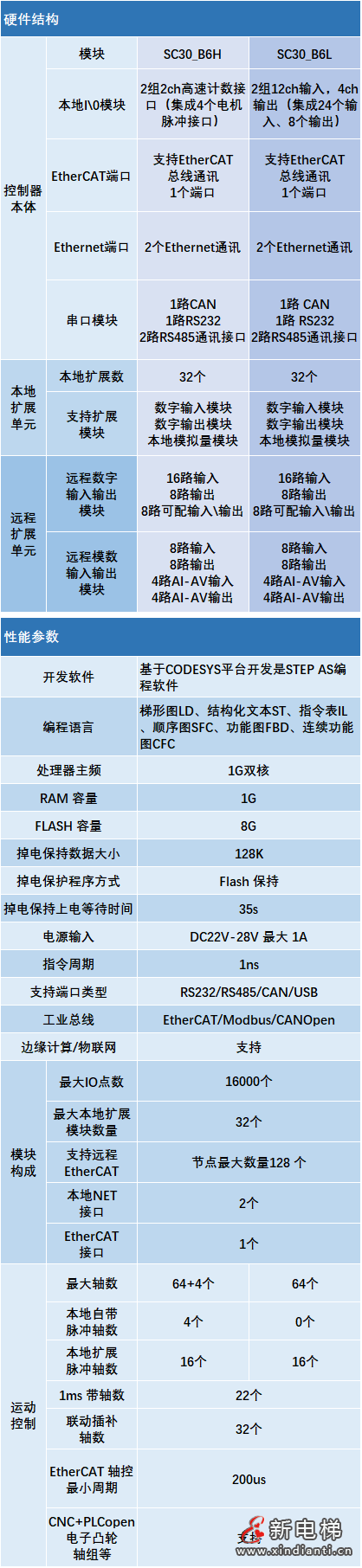
The SC30 controller has a rich interface structure and outstanding comprehensive performance, which can meet the needs of various occasions. It has a powerful SoftMotion motion control library and supports various motion control functions such as electronic cam, electronic gear ratio, CNC, flying shear, torque, shaft group interpolation, probe, etc; It has 3 NET ports, including 2 EtherNET communication ports and 1 EtherCAT bus communication port.
#1 programming language
In addition to fully complying with the IEC 61131-3 international PLC programming standard rules, it also complies with the PLCOpen motion control specification; Eliminate technical differences and barriers among program developers to ensure maximum interoperability of user programming skills;
STEP AS programming software developed based on the CODESYS platform, supporting 6 programming languages: Structured Text (ST) language, Ladder Diagram (LD), Instruction List (IL), Sequence Diagram (SFC), Function Diagram (FBD), and Continuous Function Diagram (CFC);
Various process libraries and motion control libraries with independent intellectual property rights, meeting the functional and process requirements of various industrial equipment, and improving the production efficiency and process of equipment;
Support programming methods using high-level languages such as Matlab simulation import, script programming, and object-oriented programming. At the same time, it is easy for users to develop their own proprietary functional blocks and instruction libraries, forming a "process package" with industry characteristics, which can significantly improve user programming efficiency.
#2 Hardware interfaces
High interface integration, diversified communication methods, integrated pulse control and bus control, and other characteristics;
Integrated with multiple industrial interfaces, including RS485, RS232, CAN, USB and other industrial interfaces, to meet communication needs in various scenarios;
Integrated EtherCAT bus axis and pulse axis interfaces to meet the control needs of bus type servo drives and pulse type servo drives; The EtherCAT bus communication method can accommodate up to 64 motion axes;
Integrated plug-in expansion mode and EtherCAT remote bus expansion mode, supporting switch input/output IO and analog input/output IO; Through plug-in expansion units and remote bus expansion, it can support up to 16000 IO points.

#3 硬件結構及參數配置